在现代自动化包装产线中,高速、高精度、多工站协同一直是技术攻关的难点。今天,我们将走进一条高效的拧盖装盒包装线,看高创运动控制方案如何以MC804运动控制器为核心,搭配BD3E伺服驱动器与PH3电机,驱动蜘蛛手与R2机器人,实现每分钟超过50瓶的稳定生产。
多机器人协同的智能包装系统
该包装线主要包含旋盖与装盒两大核心工站,由Delta蜘蛛手、R2机器人及多台六关节机器人共同完成。
1.旋盖工站
蜘蛛手上料:视觉系统对托盘中的瓶盖进行定位,蜘蛛手精准抓取,并放置于间歇运动的料带上。料带每次前进5个瓶盖距离,为R2机器人持续供料。
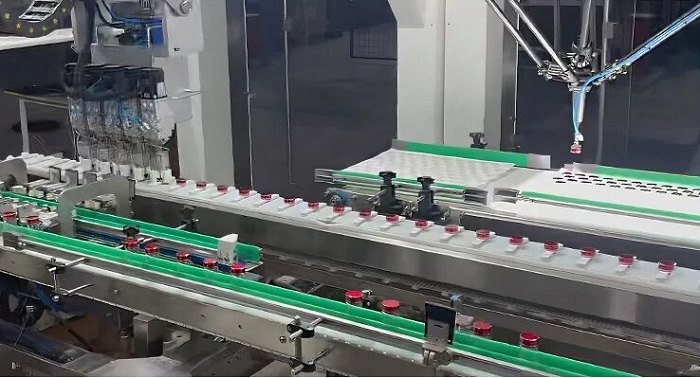
R2机器人取盖旋盖:R2机器人一次性抓取5个瓶盖,移送至对应瓶口上方,通过集成在末端的5个拧紧伺服单元完成拧盖动作,随后将瓶子放至下料皮带,输送至装盒工站。
2.装盒工站
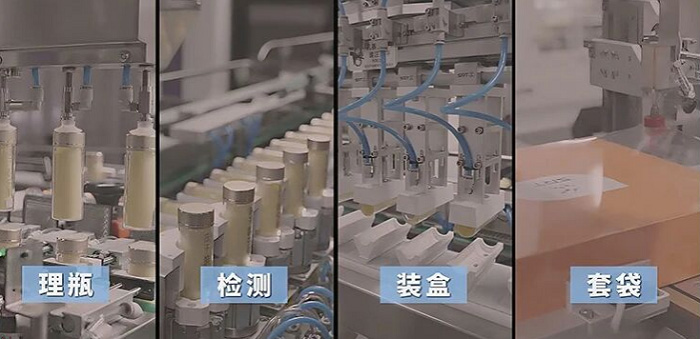
一台R2机器人与6台标准六关节机器人通过网络协同作业,共同完成理瓶、检测、装盒、套袋等一系列工序,实现全流程自动化。
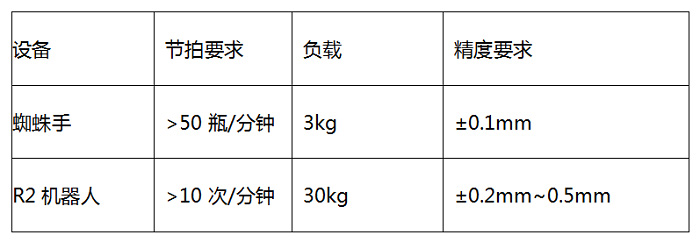
控制要求:
通讯集成:支持ModbusRTU控制步进电机;支持ModbusTCP与6台机器人及视觉系统实时通讯。除机器人本体控制外,系统还需实现:
工艺配合:视觉定位、动态跟踪放料、扭矩控制拧盖、多机协同路径规划等。
控制要点实现
蜘蛛手动态跟踪放料:通过传感器实时捕捉料带位置,结合MC804高速运算能力,实现放料过程中的动态追踪与精准放置。
R2机器人路径优化:针对负载大、速度高的特点,进行运动轨迹与加减速优化,确保运行平稳、定位准确。
扭矩控制拧盖:通过BD3E驱动器精准的扭矩模式,实现瓶盖拧紧工艺,避免过紧或松脱。
多机器人协同:基于ModbusTCP实现中央调度,确保各机器人动作连贯、无冲突。
高创方案核心价值
1.强劲性能,一机多控
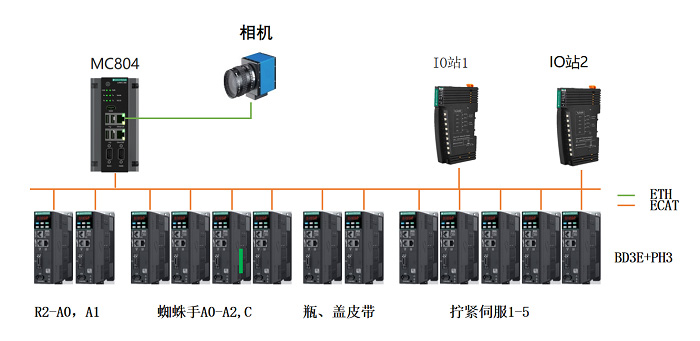
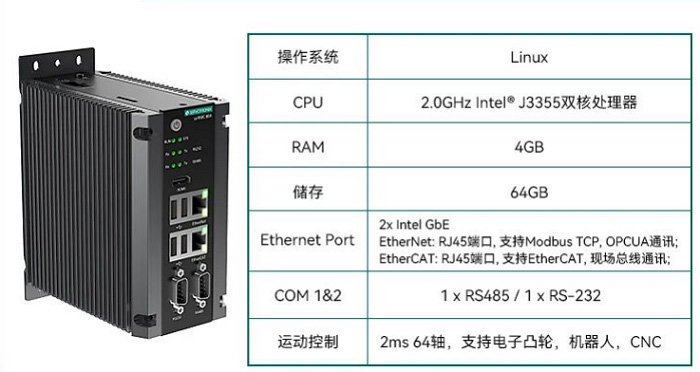
MC804控制器内置双核2GHzCPU,一个控制器即可同步控制:
· 1台蜘蛛手(Delta机器人)
· 1台R2机器人
· 7个辅助轴(拧紧伺服、步进电机等)
控制周期低至2ms,所有逻辑与运动控制集成于同一程序,不仅大幅简化编程与调试,更提升了系统响应速度与同步精度,完美支撑产线>50瓶/分钟的高速节拍。
2.接口丰富,组网灵活
自带RS485接口,通过ModbusRTU协议直接控制步进电机,节省额外控制模块。
自带千兆网口,支持ModbusTCP通讯,轻松与6台六关节机器人、视觉系统组网,实现数据实时交互与协同调度。
3.定制开发,快速交付
高创不仅提供标准蜘蛛手模型,更为客户定制开发R2机器人模型,并配套专用程序模板。客户可直接基于成熟架构进行工艺调整,显著缩短项目开发周期,加快投产进度。
4.高效稳定,性价比突出
该产线自投入运行以来,持续稳定达到设计节拍,生产效率与产品一致性获得客户高度认可。MC804控制器以单机集成多系统的方式,在保证性能的同时,降低了硬件成本与系统复杂度,为客户提供了更高性价比的整体解决方案。
从精准取放、高速旋盖到多机协同包装,高创凭借MC804运动控制器+BD3E伺服驱动器+PH3电机的组合,展现了在复杂机器人协同场景中的强大技术整合与控制能力。我们不仅提供硬件,更提供贴合工艺的定制化开发与全程技术支持,助力客户智能制造升级。